
桌上型机器人的基本结构是什么?
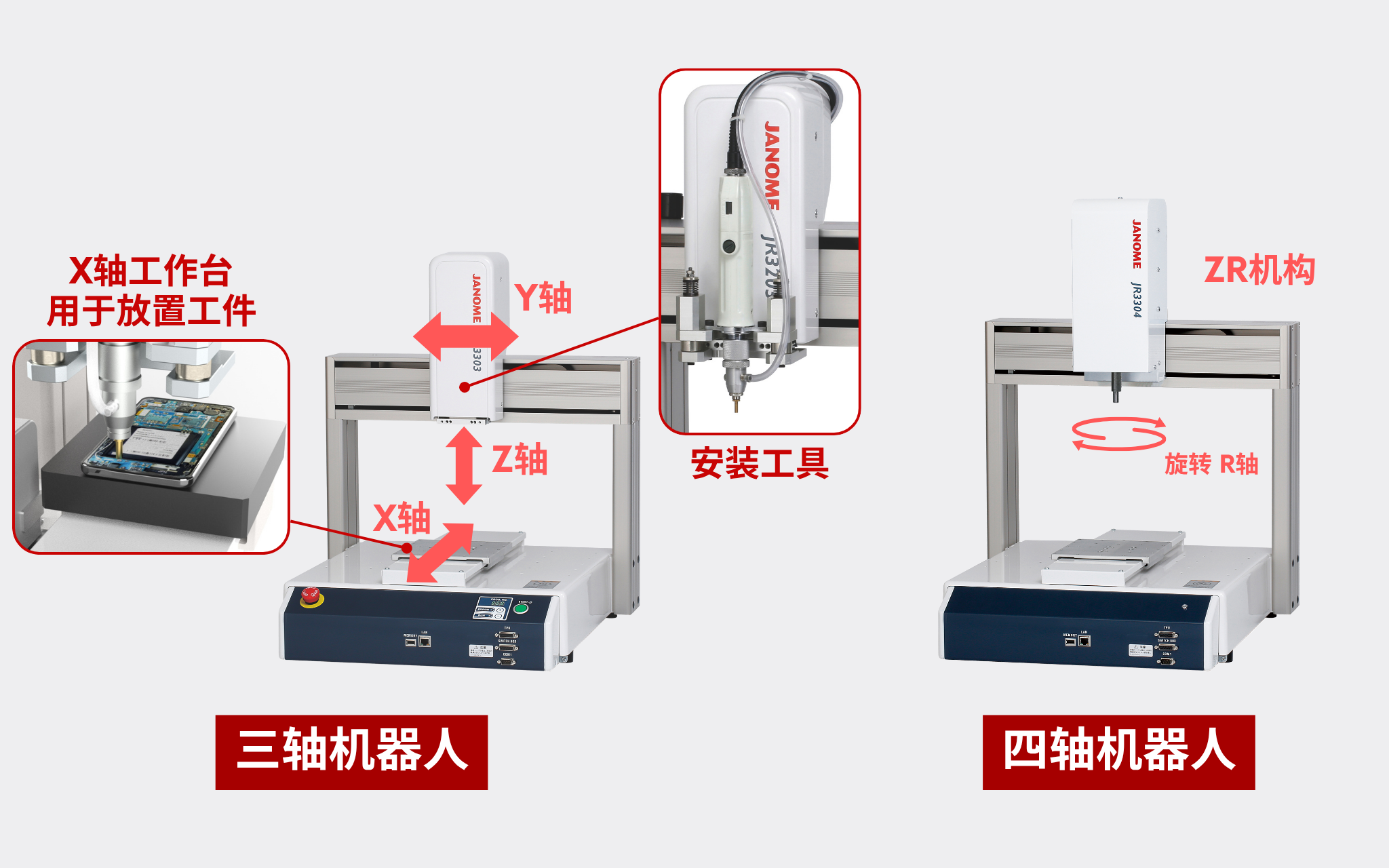
桌上型机器人是具有直交坐标系的3轴或4轴(带R旋转轴)的机器人。
将工件(加工对象)放在X工作台上,X轴前后移动,工具在Y轴左右移动,在Z轴上下移动。
各轴由步进电机驱动。
桌上型机器人是什么?即使是自动化新手也能理解的基本结构与应用示例
JANOME的桌上型机器人有5种尺寸(参见下表),可根据用途和工件尺寸进行选择。
| 可动范围 [mm] | 最大可搬质量 [kg] | ||||
|---|---|---|---|---|---|
| X | Y | Z | R ※ | 工件 | 工具 |
| 200 | 200 | 50 | ±360° | 7 | 3.5 |
| 300 | 320 | 100 | 15 | 7 | |
| 400 | 400 | 150 | |||
| 510 | 510 | ||||
| 510 | 620 | ||||
※四轴机器人。
桌上型机器人需要将工件固定在X型工作台上才能移动。
此外,如上图所示,标准规格无法应对质量超过15kg的工件,请注意。
※JR3000系列可搬运大重量规格可应对最大20kg的工件重量。
由于这些特点,桌上型机器人通常作为单台独立的单元生产设备使用。。
不过,最近也有与协作机器人(Cobot)组合成生产线,或多台并行设置,与输送机联动进行定制使用的案例。
【视频】JANOME自动化设备的案例
我们特别擅长对小型工件进行超精密加工。
例如,密封剂或胶水的微细涂布等便是其中的典型代表。
其他典型的应用示例包括以下工艺:
- 螺丝紧固
- 焊锡(烙铁焊锡、激光焊锡)
- 电路板分割(路由器切割方式)
- 基于图像处理的外观检测
- 针脚的压入
- 大气压等离子体表面处理
这些工作大多与拾取和放置不同,但例如将螺丝和销钉等部件从托盘上拾取并组装到工件上的工作,则可以利用桌上型机器人来完成。

