随着制造现场自动化需求的日益高涨,节省空间且易于导入的桌上型机器人备受关注。然而,在导入时,可能会因“应选择哪种型号”、“需要多少可搬运重量”等而感到困惑。
本文从技术角度出发,对JANOME桌上型机器人选择时应注意的5个要点,如XYZR轴结构、可搬运质量、操作部、电源规格等进行了通俗易懂的说明。
在选择适合用途的机器人时,请务必参考以下信息作为决策依据。
(※本文说明基于JR3000系列, JR4000系列在型号构成及部分项目名称上可能存在差异,选型时请务必确认各系列的具体规格。)
JANOME的桌上型机器人 型号代码
型式代码中包含了在选型时需要确认的5个关键点。
通过理解各项目的含义,可以高效地选定通过理解各项目的含义,可以高效地选定。
| (1) 种类 |
(2) X轴・Y轴行程(mm) |
(3) 轴数 |
(4) 编码器・产品种类 |
(5) 操作部规格 |
(6) 电源规格 |
|---|---|---|---|---|---|
|
JR3000系列 |
20:200×200 30:300×320 40:400×400 50:510×510 60:510×620 |
2:2轴 3:3轴 4:4轴 |
E:有 N:无 F:可搬运大重量规格 |
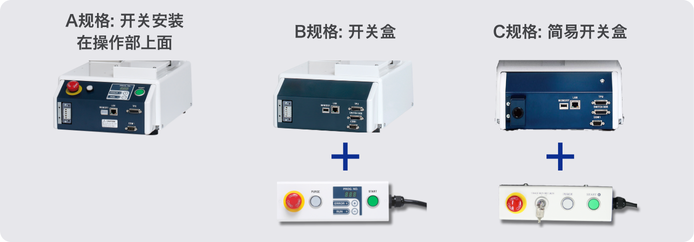
A:开关安装在操作部上面 B:开关盒 C:简易开关盒 |
C:中国、主要为EU范围内 J:主要为日本国内 |
※JR4000系列的型号代码请参见此处。
①尺寸:动作范围·可搬运质量
桌上型机器人有5种尺寸(参见下表)。
在选择时,请根据预计的使用动作范围和可搬运重量选择合适的尺寸。
| 可动范围 [mm] | 最大可搬质量 [kg]※2 | ||||
|---|---|---|---|---|---|
| X | Y | Z | R ※1 | 工件 | 工具 |
| 200 | 200 | 50 | ±360° | 7 | 3.5 |
| 300 | 320 | 100 | 15 | 7 | |
| 400 | 400 | 150 | |||
| 510 | 510 | ||||
| 510 | 620 | ||||
※1: 4轴机器人。
※2: JR3000系列可搬运大重量规格可应对最大工具重量15kg、最大工件重量20kg。
②轴数(XYZ轴+R轴)
我们提供3轴和4轴两种规格。
如果工具的运动需要旋转动作(R轴),请选择4轴规格的型号。
③编码器及产品类型
根据用途,我们提供以下规格:
| 型号 | 规格概要 |
|---|---|
| N | 无编码器 |
| E | 带编码器(支持失步检测及错误停止功能) |
| F | 可搬运大重量规格(最大:工件20kg/工具15kg) ※尺寸为300×320、400×400(双支撑)的2种型号 
|
| T | 双X轴规格 (有两个X型工作台。同时进行作业和换模操作)
|
| ERT | 上吸式集尘方式的基板分割规格 |
| EBV | 下吸式集尘方式的基板分割规格 |
| AP-D | 配备摄像头等,可进行位置、高度校正的点胶专用规格 |
编码器规格说明
桌上型机器人采用步进电机,在过载时可能会发生“失调”现象,导致位置偏差。
带编码器规格可检测此异常,当发生“失步”现象时,系统将自动停止运行以确保产品质量。
④操作部规格(启动开关、程序切换开关的位置)
程序编号的显示/切换以及启动位置的设置,可根据需求从以下三个选项中选择。
⑤电源规格(是否带插座)
在此处需选择的是电源插座(插座)的有無及类型。
C:无插座
(无符号):有插座(支持200V)
J:有插座(支持100V)
为选择桌上型机器人而苦恼的人
桌上型机器人的规格因用途和工作条件而异,最佳配置也各不相同。
对于“哪种尺寸和轴数最合适”、“是否真的需要编码器和4轴规格”等选择时的问题,我们根据现场实际经验提出建议。
有关更详细的规格比较和按用途选择的实例,请参考以下内容。
咨询选型及报价请联系
